


Siga o Olhar Digital no Google Discover
Pesquisadores do MIT deram um passo gigante na robótica biohíbrida: agora, robôs movidos a músculos cultivados em laboratório podem se mover com mais força e rapidez graças a tendões artificiais. A inovação promete expandir o uso de robôs musculares em microcirurgias, exploração e aplicações do dia a dia.
O segredo, segundo o TechXplore, está na combinação de músculos vivos com tendões feitos de hidrogel resistente e flexível, que transmitem a força de forma muito mais eficiente. O resultado? Garras robóticas capazes de pinçar com 30 vezes mais força e três vezes mais rapidez do que antes.
Tendões artificiais: o segredo para robôs mais fortes
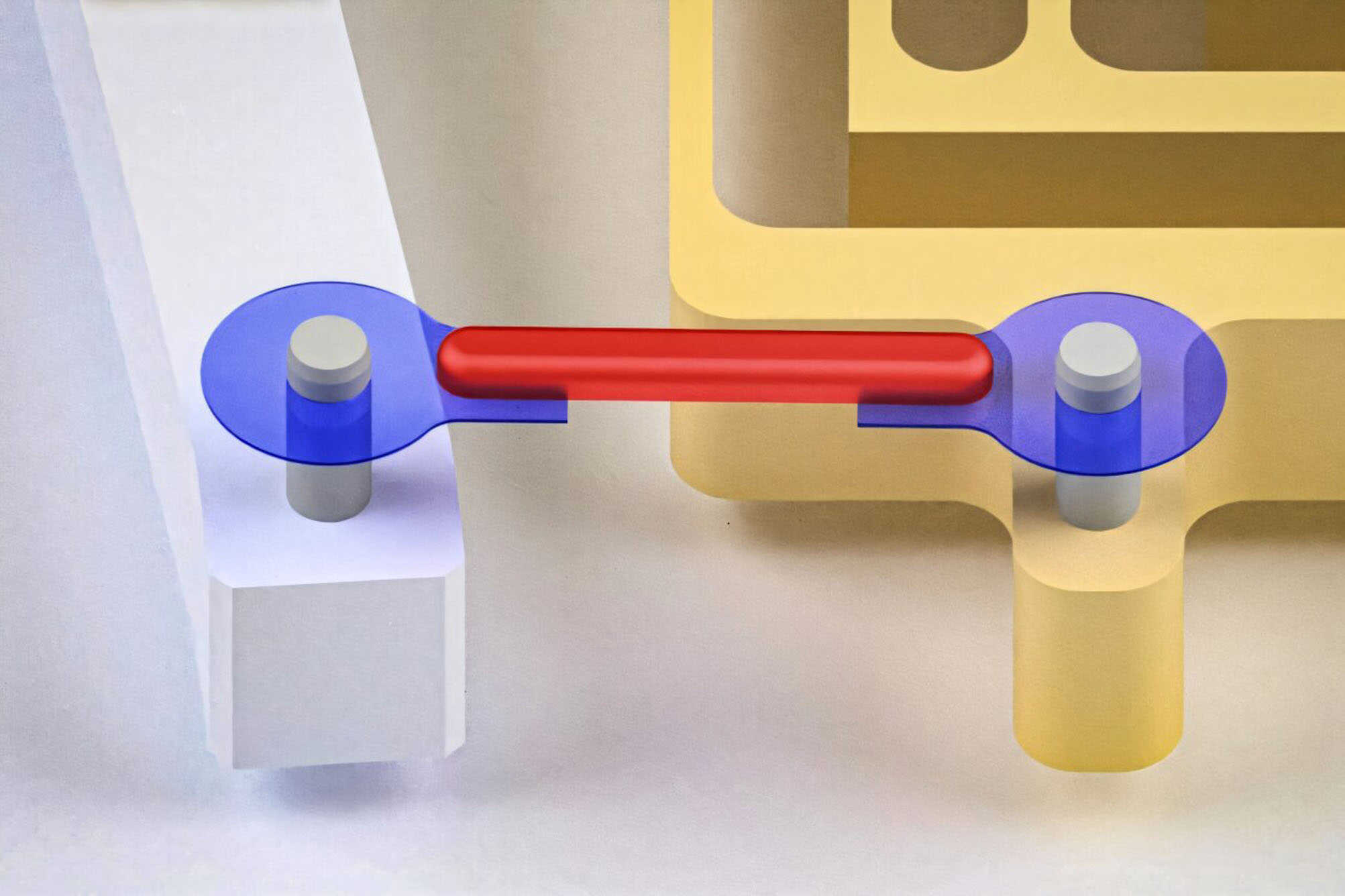
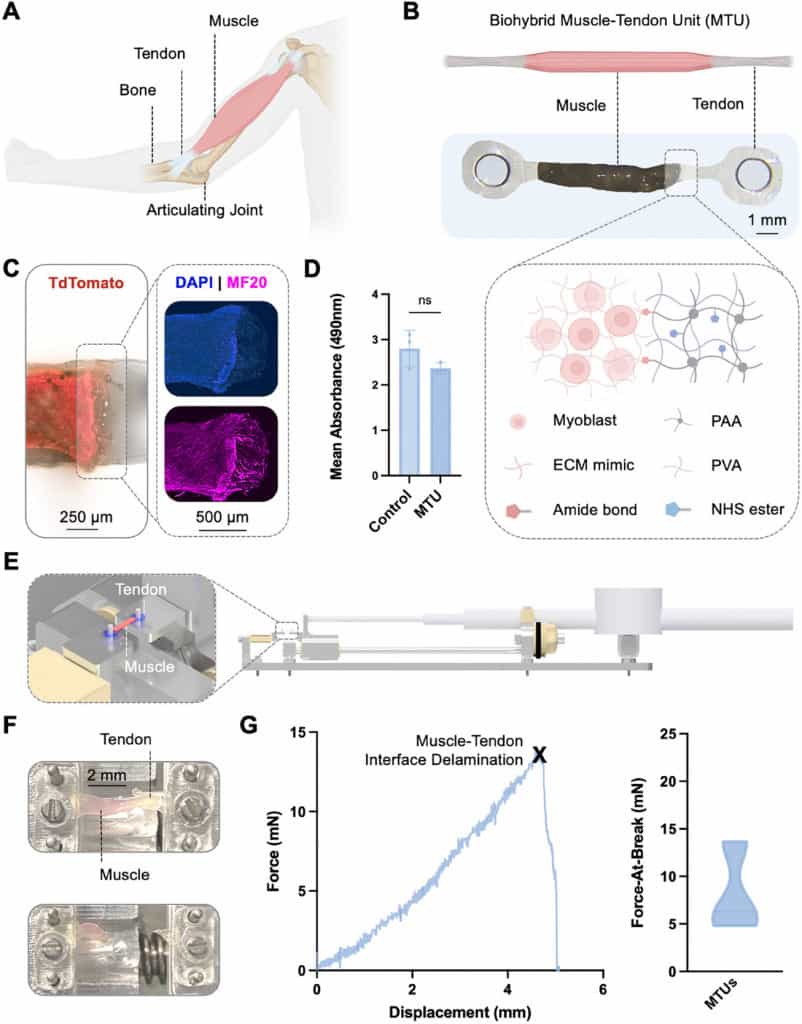
No estudo publicado na revista Advanced Science, a equipe do MIT conectou tendões de hidrogel às extremidades de músculos cultivados em laboratório. Esses tendões se ligam à estrutura sintética da garra robótica, criando uma “unidade músculo-tendão”.
Estamos introduzindo tendões artificiais como conectores intercambiáveis entre atuadores musculares e esqueletos robóticos.
Ritu Raman, professora assistente de engenharia mecânica e líder da pesquisa, em nota
Segundo ela, “essa modularidade pode facilitar o desenvolvimento de uma ampla gama de aplicações robóticas.”
A combinação permite que o músculo trabalhe de forma mais eficiente, evitando desperdício de tecido e reduzindo o risco de rupturas, mantendo performance por milhares de ciclos de contração.
Como o sistema funciona
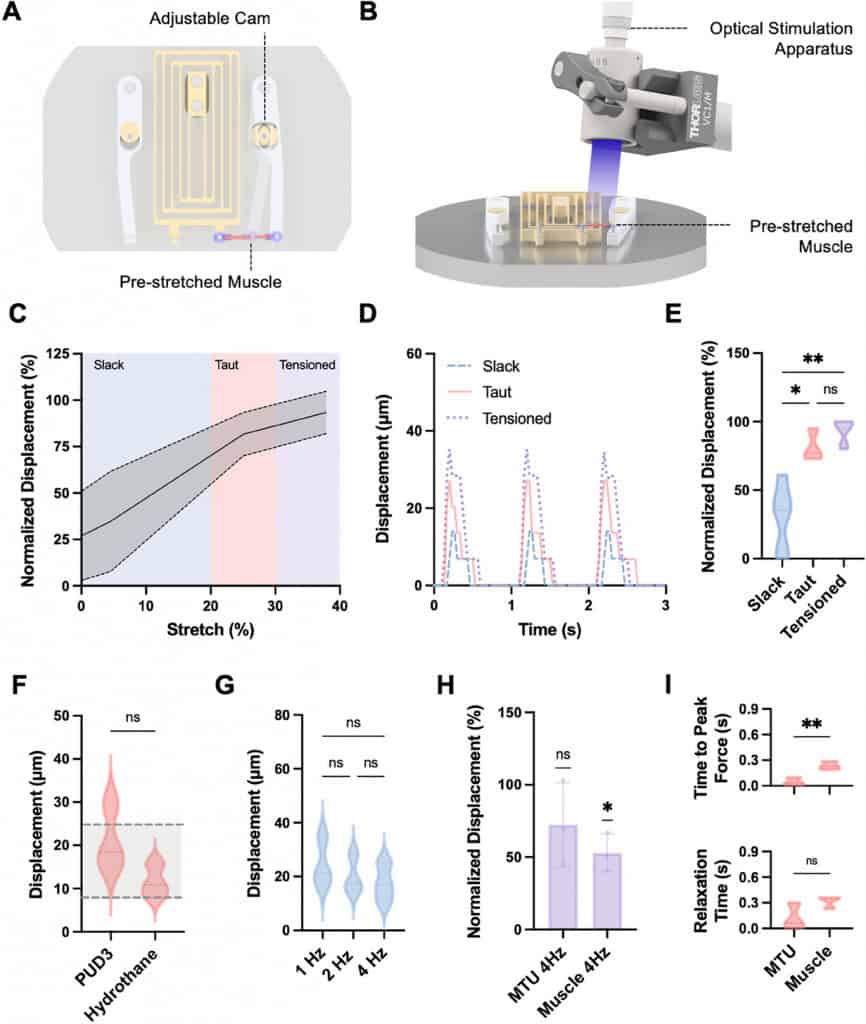
A equipe modelou o sistema usando três tipos de molas, representando músculo, tendão e estrutura da garra. Com essa abordagem, definiram a rigidez ideal para os tendões, garantindo movimentos mais rápidos e potentes. Alguns dos destaques:
- Garras pinçam três vezes mais rápido do que sem tendões;
- Força é 30 vezes maior;
- Redução do músculo necessário, aumentando a relação potência/peso em 11 vezes;
- Funciona de forma consistente por milhares de ciclos;
- Modularidade facilita adaptação a outros robôs biohíbridos.
Por que músculos vivos fazem a diferença
Os músculos vivos oferecem vantagens únicas: cada célula atua como um atuador independente, podendo se fortalecer e se curar naturalmente. Isso permite criar robôs pequenos, eficientes e adaptáveis, algo que atuadores tradicionais não conseguem.
Leia mais:
“Normalmente, se um músculo é muito macio e está preso a algo rígido, ele se rompe. Com tendões resistentes, a força é transmitida e o movimento se torna eficiente”, explica Raman.
Robôs musculares poderiam, no futuro, explorar ambientes perigosos, realizar cirurgias em microescala ou atuar como assistentes autônomos em tarefas delicadas. Agora, com os tendões artificiais validados, a equipe do MIT trabalha em revestimentos protetores que imitam a pele, tornando os robôs mais resistentes a condições externas e aproximando-os ainda mais da biologia humana.




