




A robótica já faz parte da agricultura moderna, mas uma tarefa continua desafiando até as máquinas mais avançadas: colher frutas delicadas sem danificá-las. Enquanto equipamentos maiores conseguem acelerar a colheita de culturas mais resistentes, frutas como morangos, framboesas e tomates ainda dependem, em grande parte, de um cuidado muito grande para evitar amassados e perdas.
Continua após a publicidade
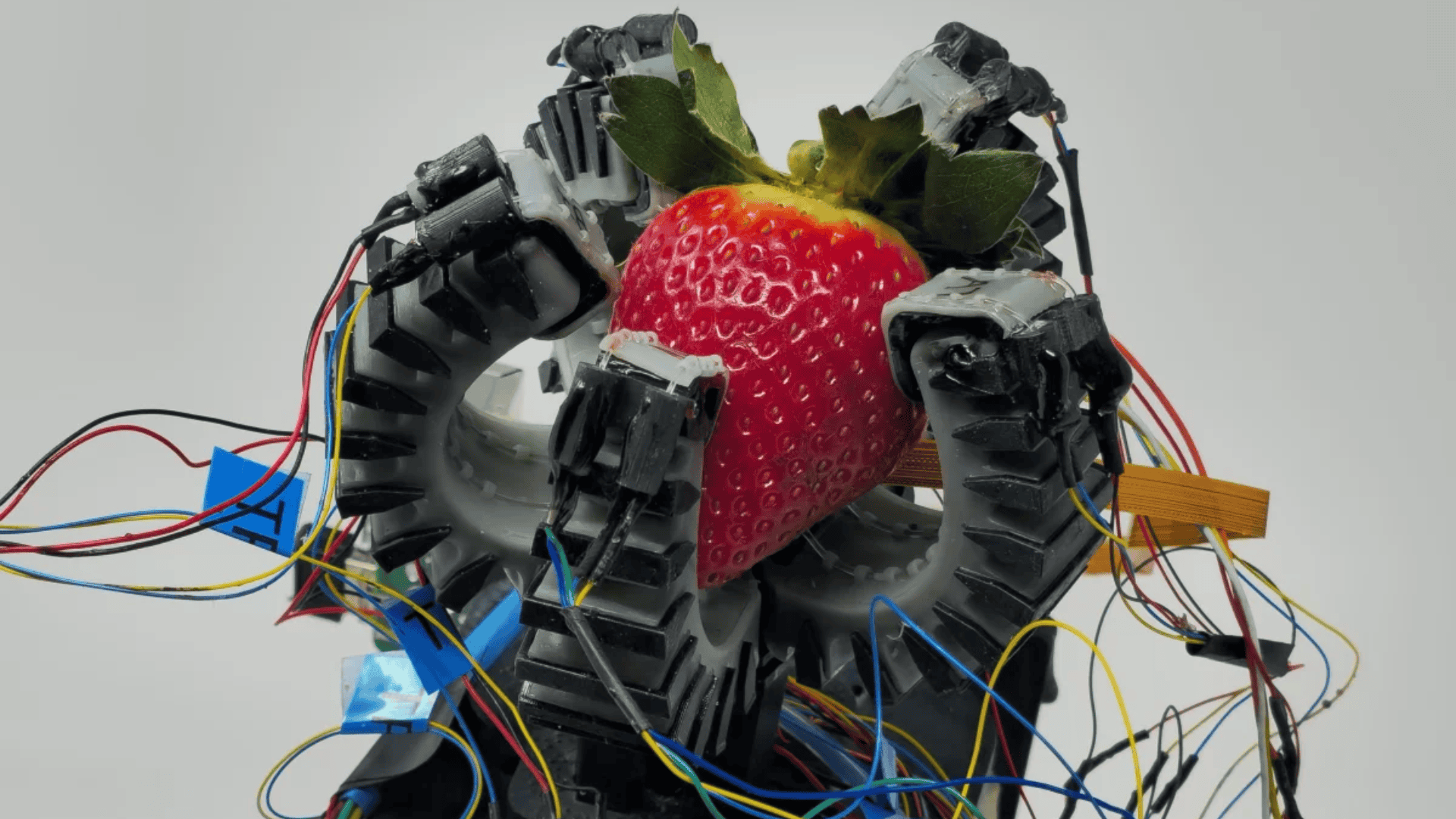
Agora, pesquisadores da Universidade da Virgínia Ocidental acreditam ter encontrado uma solução. Eles desenvolveram recentemente uma mão robótica com cinco “dedos” macios e flexíveis, projetada para colher frutos pequenos e sensíveis sem comprometer sua qualidade. A tecnologia busca enfrentar a perda estimada de cerca de 25% das frutas delicadas durante a colheita, muitas vezes por danos causados pela pressão exercida por mãos humanas ou máquinas convencionais.
Para quem tem pressa:
- Pesquisadores desenvolveram uma mão robótica inspirada em estrelas-do-mar para colher frutas delicadas, como morangos e framboesas, sem danificá-las;
- O dispositivo tem cinco “dedos” macios, uma câmera e sensores que combinam visão e tato para identificar se a fruta está madura antes da colheita;
- Após bons resultados nos testes, a equipe pretende levar a tecnologia para plantações nos próximos anos e avalia aplicações futuras em missões espaciais e subaquáticas.
Inspiração nas estrelas-do-mar
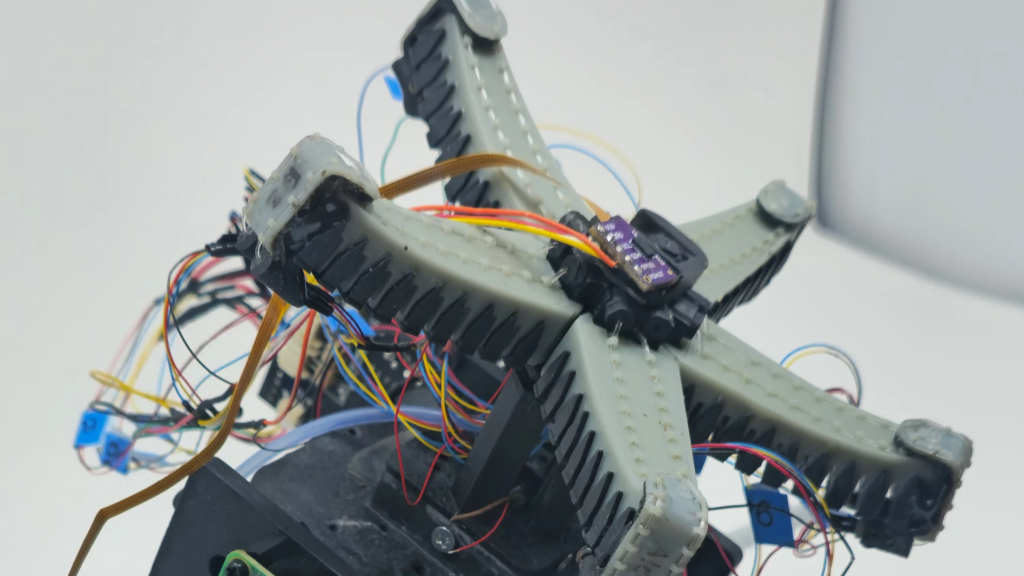
O desenvolvimento da mão robótica foi inspirado nas estrelas-do-mar. Com cinco “dedos” macios feitos de silicone e poliuretano, ela consegue se adaptar ao formato da fruta para colhê-la com mais segurança. O robô é capaz de levantar objetos de até 1 kg.
Mais do que desenvolver uma espécie de garra flexível, a ideia dos pesquisadores era tornar a tecnologia capaz de identificar o grau de maturação das frutas.
Para isso, eles instalaram uma pequena câmera no centro da mão robótica, permitindo que o sistema identificasse visualmente se os frutos estavam prontos para a colheita. Com essa solução, porém, surgiu outro desafio.
Algumas frutas são difíceis de avaliar apenas pela aparência. Uma das técnicas mais eficazes utilizadas pelos colhedores é o tato, em que podem sentir o peso do fruto, as características da casca e o quanto ele ainda está preso ao caule. Com isso em mente, os cientistas buscaram reproduzir essa habilidade na mão robótica.
O protótipo final foi equipado com sensores nas pontas dos dedos, capazes de tocar suavemente a fruta e avaliar seu grau de maturação com maior precisão.
Com aprovação em todos os testes, o robô segue em desenvolvimento. Um dos líderes do projeto, Anand Mishra, professor assistente do Departamento de Engenharia Mecânica, de Materiais e Aeroespacial da universidade, afirmou que a ideia é levá-lo para o campo nos próximos anos.
Para implantação comercial, estamos atualmente desenvolvendo uma versão mais escalável da garra, com o objetivo de implementá-la em campo nos próximos dois a quatro anos.
Anand Mishra.
Os pesquisadores ainda observam a possibilidade de posicionar a tecnologia além da agricultura. Eles acreditam que o robô e suas habilidades podem ser utilizados em missões espaciais ou subaquáticas, onde são necessárias precisão e, muitas vezes, cuidados no toque.



